Cross-checking steering data¶
In this notebook, we integrate steering rate to get steering angle data and compare it with steering angle data directly obtained from CAN bus.
[8]:
import binascii
import bitstring
import time
import datetime
import serial
import csv
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd # Note that this is not commai Panda, but Database Pandas
import cantools
import matplotlib.animation as animation
from matplotlib import style
import uuid
[9]:
import strym.DBC_Read_Tools as DBC
from datetime import datetime
def dateparse(ts):
# if you encounter a "year is out of range" error the timestamp
# may be in milliseconds, try `ts /= 1000` in that case
ts = float(ts)
d = datetime.fromtimestamp(ts).strftime('%Y-%m-%d %H:%M:%S:%f')
return d
/home/ivory/anaconda3/envs/dbn/lib/python3.7/site-packages/statsmodels/tools/_testing.py:19: FutureWarning: pandas.util.testing is deprecated. Use the functions in the public API at pandas.testing instead.
import pandas.util.testing as tm
[3]:
datetime.fromtimestamp(1583178900.1435766)
[3]:
datetime.datetime(2020, 3, 2, 12, 55, 0, 143577)
[4]:
fileName = '../../PandaData/2020_03_02/2020-03-02-12-54-30-482889__CAN_Messages.csv'
#can_data = pd.read_csv(fileName, parse_dates=[0], date_parser=dateparse)# read in the data
can_data = pd.read_csv(fileName)# read in the data
dbcfile = '../examples/newToyotacode.dbc'
db_file = cantools.db.load_file(dbcfile)# Specify your dbc file
[5]:
can_data
[5]:
| Time | Buffer | Bus | MessageID | Message | MessageLength | |
|---|---|---|---|---|---|---|
| 0 | 1.583179e+09 | 000040520800d4e7000000000200009e | 0 | 658 | 000000000200009e | 8 |
| 1 | 1.583179e+09 | 000000301800acc55d084400e0000113 | 1 | 384 | 5d084400e0000113 | 8 |
| 2 | 1.583179e+09 | 00002030180027c65d1592fc620001ed | 1 | 385 | 5d1592fc620001ed | 8 |
| 3 | 1.583179e+09 | 000040301800a2c75d075ef9a00001e7 | 1 | 386 | 5d075ef9a00001e7 | 8 |
| 4 | 1.583179e+09 | 0000603018001ec85dfff800000000e0 | 1 | 387 | 5dfff800000000e0 | 8 |
| ... | ... | ... | ... | ... | ... | ... |
| 42862 | 1.583179e+09 | 0000807f08005c3c00002b802b807f18 | 0 | 1020 | 00002b802b807f18 | 8 |
| 42863 | 1.583179e+09 | 0000003218007713a900640000845882 | 1 | 400 | a900640000845882 | 8 |
| 42864 | 1.583179e+09 | 000020321800ef13a900370000845856 | 1 | 401 | a900370000845856 | 8 |
| 42865 | 1.583179e+09 | 0000403218006b15a906000000845826 | 1 | 402 | a906000000845826 | 8 |
| 42866 | 1.583179e+09 | 000060321800e415a9025f0000845882 | 1 | 403 | a9025f0000845882 | 8 |
42867 rows × 6 columns
[6]:
can_data['ClockTime'] = can_data['Time'].apply(dateparse)
can_data
[6]:
| Time | Buffer | Bus | MessageID | Message | MessageLength | ClockTime | |
|---|---|---|---|---|---|---|---|
| 0 | 1.583179e+09 | 000040520800d4e7000000000200009e | 0 | 658 | 000000000200009e | 8 | 2020-03-02 12:54:30:757006 |
| 1 | 1.583179e+09 | 000000301800acc55d084400e0000113 | 1 | 384 | 5d084400e0000113 | 8 | 2020-03-02 12:54:30:759268 |
| 2 | 1.583179e+09 | 00002030180027c65d1592fc620001ed | 1 | 385 | 5d1592fc620001ed | 8 | 2020-03-02 12:54:30:759619 |
| 3 | 1.583179e+09 | 000040301800a2c75d075ef9a00001e7 | 1 | 386 | 5d075ef9a00001e7 | 8 | 2020-03-02 12:54:30:760273 |
| 4 | 1.583179e+09 | 0000603018001ec85dfff800000000e0 | 1 | 387 | 5dfff800000000e0 | 8 | 2020-03-02 12:54:30:760664 |
| ... | ... | ... | ... | ... | ... | ... | ... |
| 42862 | 1.583179e+09 | 0000807f08005c3c00002b802b807f18 | 0 | 1020 | 00002b802b807f18 | 8 | 2020-03-02 12:55:00:167643 |
| 42863 | 1.583179e+09 | 0000003218007713a900640000845882 | 1 | 400 | a900640000845882 | 8 | 2020-03-02 12:55:00:167911 |
| 42864 | 1.583179e+09 | 000020321800ef13a900370000845856 | 1 | 401 | a900370000845856 | 8 | 2020-03-02 12:55:00:168159 |
| 42865 | 1.583179e+09 | 0000403218006b15a906000000845826 | 1 | 402 | a906000000845826 | 8 | 2020-03-02 12:55:00:169032 |
| 42866 | 1.583179e+09 | 000060321800e415a9025f0000845882 | 1 | 403 | a9025f0000845882 | 8 | 2020-03-02 12:55:00:169294 |
42867 rows × 7 columns
[10]:
decimalData_STEER_ANGLE = DBC.convertData('STEER_ANGLE_SENSOR',0, can_data, db_file)
decimalData_STEER_FRACTION = DBC.convertData('STEER_ANGLE_SENSOR',1, can_data, db_file)
decimalData_STEER_RATE = DBC.convertData('STEER_ANGLE_SENSOR',2, can_data, db_file)
[11]:
Steering_Rate_Time = decimalData_STEER_RATE['Time'].values
Steering_Rate_Message = decimalData_STEER_RATE['Message'].values
[12]:
Steering_Angle_Time = decimalData_STEER_ANGLE['Time'].values
Steering_Angle_Message = decimalData_STEER_ANGLE['Message'].values
[13]:
from scipy import integrate
[14]:
Steering_Rate_int = integrate.cumtrapz(Steering_Rate_Message, Steering_Rate_Time, initial=Steering_Angle_Message[0])
[15]:
import matplotlib.pyplot as plt
[17]:
plt.style.use('seaborn')
plt.rcParams["figure.figsize"] = (12,8)
params = {'legend.fontsize': 18,
'legend.handlelength': 2}
plt.rcParams.update(params)
plt.rcParams["font.family"] = "Times New Roman"
fig =plt.figure()
ax = fig.add_subplot(1,1,1)
ax.set_axisbelow(True)
ax.minorticks_on()
ax.tick_params(axis="x", labelsize=18)
ax.tick_params(axis="y", labelsize=18)
ax.grid(which='minor', linestyle=':')
ax.set_xlabel('Time', fontsize=18)
ax.set_ylabel('Message', fontsize=18)
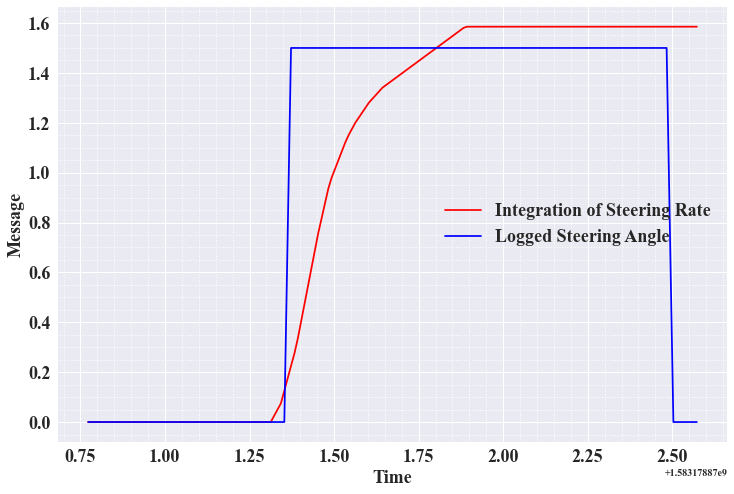
plt.plot(Steering_Rate_Time[0:100], Steering_Rate_int[0:100], 'r-', Steering_Angle_Time[0:100], Steering_Angle_Message[0:100], 'b-' )
ax.legend(['Integration of Steering Rate', 'Logged Steering Angle' ])
plt.show()
[18]:
Steering_Rate_int[100:200]
[18]:
array([ 1.58526981, 1.58526981, 1.58526981, 1.58526981,
1.58526981, 1.58526981, 1.58526981, 1.58526981,
1.58526981, 1.58526981, 1.58526981, 1.58526981,
1.58526981, 1.56516278, 1.54539597, 1.50520575,
1.44509804, 1.42509139, 1.38446772, 1.36516392,
1.32456076, 1.30475533, 1.28455031, 1.24465239,
1.20459807, 1.18473446, 1.14454091, 1.12409842,
1.09439278, 1.07453132, 1.0446732 , 1.03440547,
0.98449707, 0.97439361, 0.96447587, 0.95472646,
0.93427491, 0.92489195, 0.91475272, 0.87490606,
0.86430645, 0.85475516, 0.8447994 , 0.8447994 ,
0.8447994 , 0.8447994 , 0.8447994 , 0.8447994 ,
0.8447994 , 0.8447994 , 0.8447994 , 0.8447994 ,
0.8447994 , 0.8447994 , 0.8447994 , 0.8447994 ,
0.8447994 , 0.8447994 , 0.8447994 , 0.8447994 ,
1.19055164, 1.88677919, 3.50165498, 4.50842512,
5.66577208, 6.85920608, 11.42994058, 13.0403651 ,
14.72954524, 21.56828654, 23.19301856, 26.55898702,
30.12928617, 32.12056291, 41.84317005, 47.62998235,
49.54184902, 51.38117325, 58.56241238, 62.18069088,
64.05313981, 67.73227346, 71.20060217, 76.1646415 ,
77.80098927, 86.33583796, 93.46806777, 95.36888134,
97.31123459, 99.35971749, 112.60455143, 114.7924329 ,
117.05106747, 119.38761842, 121.82406557, 124.31059253,
126.91108596, 129.59222686, 134.83032358, 137.70602357])
[19]:
Steering_Angle_Message[100:200]
[19]:
array([ 0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. ,
0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. ,
0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. ,
0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. ,
0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. ,
0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. ,
0. , 0. , 0. , 0. , 0. , 0. , 1.5, 1.5, 3. ,
4.5, 6. , 7.5, 12. , 13.5, 15. , 22.5, 24. , 27. ,
31.5, 33. , 43.5, 48. , 51. , 52.5, 60. , 63. , 66. ,
69. , 72. , 78. , 79.5, 87. , 94.5, 96. , 99. , 100.5,
114. , 115.5, 118.5, 121.5, 123. , 126. , 129. , 130.5, 136.5,
139.5])
[20]:
plt.style.use('seaborn')
plt.rcParams["figure.figsize"] = (12,8)
params = {'legend.fontsize': 18,
'legend.handlelength': 2}
plt.rcParams.update(params)
plt.rcParams["font.family"] = "Times New Roman"
fig =plt.figure()
ax = fig.add_subplot(1,1,1)
ax.set_axisbelow(True)
ax.minorticks_on()
ax.tick_params(axis="x", labelsize=18)
ax.tick_params(axis="y", labelsize=18)
ax.grid(which='minor', linestyle=':')
ax.set_xlabel('Time', fontsize=18)
ax.set_ylabel('Message', fontsize=18)
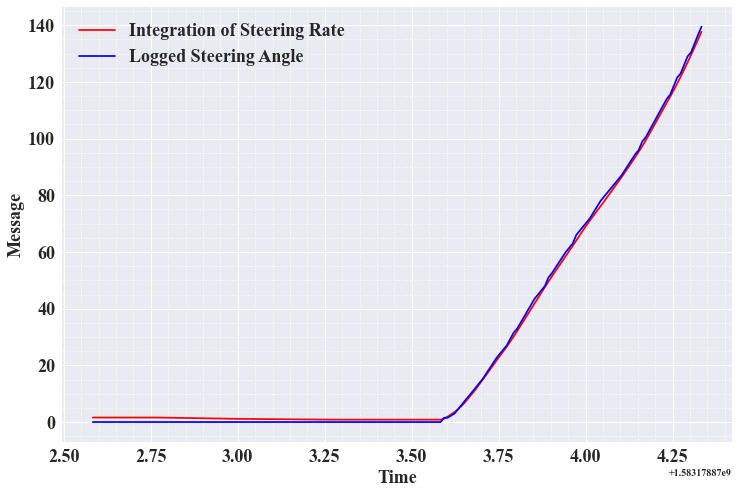
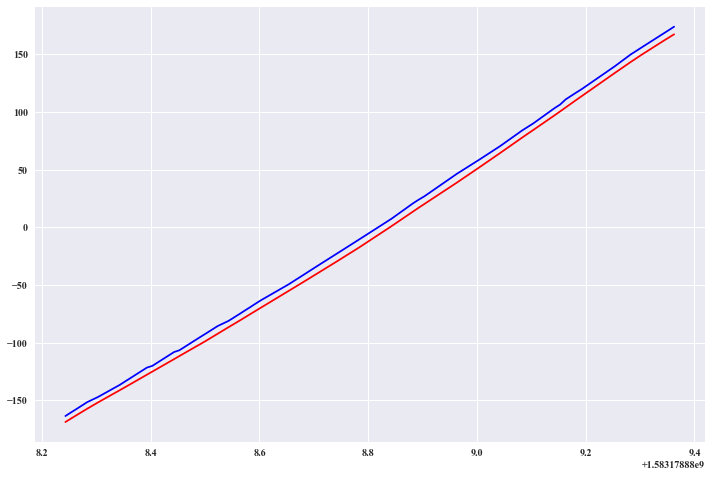
plt.plot(Steering_Rate_Time[100:200], Steering_Rate_int[100:200], 'r-', Steering_Angle_Time[100:200], Steering_Angle_Message[100:200], 'b-' )
ax.legend(['Integration of Steering Rate', 'Logged Steering Angle' ])
plt.show()
[21]:
plt.style.use('seaborn')
plt.rcParams["figure.figsize"] = (12,8)
params = {'legend.fontsize': 18,
'legend.handlelength': 2}
plt.rcParams.update(params)
plt.rcParams["font.family"] = "Times New Roman"
fig =plt.figure()
ax = fig.add_subplot(1,1,1)
ax.set_axisbelow(True)
ax.minorticks_on()
ax.tick_params(axis="x", labelsize=18)
ax.tick_params(axis="y", labelsize=18)
ax.grid(which='minor', linestyle=':')
ax.set_xlabel('Time', fontsize=18)
ax.set_ylabel('Message', fontsize=18)
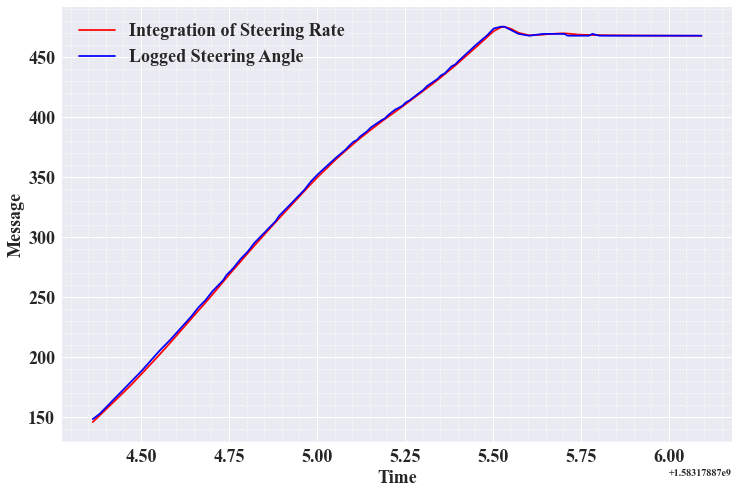
plt.plot(Steering_Rate_Time[200:300], Steering_Rate_int[200:300], 'r-', Steering_Angle_Time[200:300], Steering_Angle_Message[200:300], 'b-' )
ax.legend(['Integration of Steering Rate', 'Logged Steering Angle' ])
plt.show()
[22]:
plt.style.use('seaborn')
plt.rcParams["figure.figsize"] = (12,8)
params = {'legend.fontsize': 18,
'legend.handlelength': 2}
plt.rcParams.update(params)
plt.rcParams["font.family"] = "Times New Roman"
fig =plt.figure()
ax = fig.add_subplot(1,1,1)
ax.set_axisbelow(True)
ax.minorticks_on()
ax.tick_params(axis="x", labelsize=18)
ax.tick_params(axis="y", labelsize=18)
ax.grid(which='minor', linestyle=':')
ax.set_xlabel('Time', fontsize=18)
ax.set_ylabel('Message', fontsize=18)
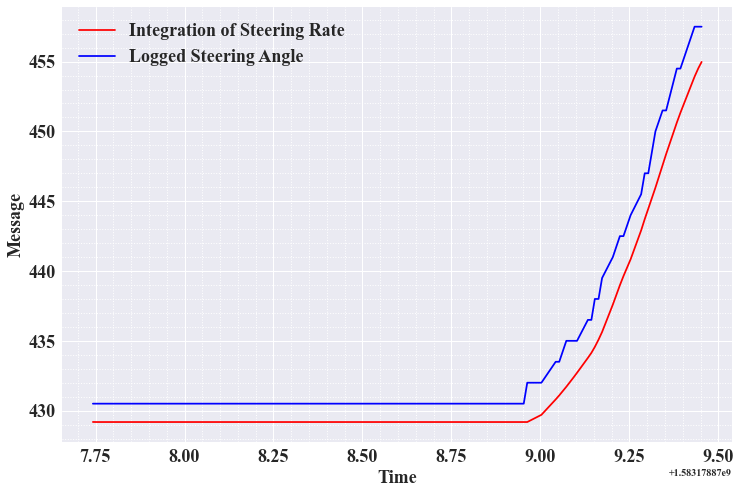
plt.plot(Steering_Rate_Time[400:500], Steering_Rate_int[400:500], 'r-', Steering_Angle_Time[400:500], Steering_Angle_Message[400:500], 'b-' )
ax.legend(['Integration of Steering Rate', 'Logged Steering Angle' ])
plt.show()
[23]:
plt.plot(Steering_Rate_Time[950:1000], Steering_Rate_int[950:1000], 'r-', Steering_Angle_Time[950:1000], Steering_Angle_Message[950:1000], 'b-' )
plt.show()
Experimental¶
[24]:
newdf = pd.DataFrame()
newdf['Time'] = decimalData_STEER_RATE['Time']
newdf['Message'] = Steering_Rate_int
newdf['ClockTime'] = newdf['Time'].apply(dateparse)
newdf
#days = pd.to_datetime(newdf['ClockTime'], unit='ns')
Time = pd.to_datetime(newdf['Time'], unit='s')
type(Time.dt.tz_localize('UTC'))
newdf['Clock'] = pd.DatetimeIndex(Time).tz_localize('UTC').tz_convert('US/Mountain')
newdf
newdf = newdf.set_index('Clock')
newdf
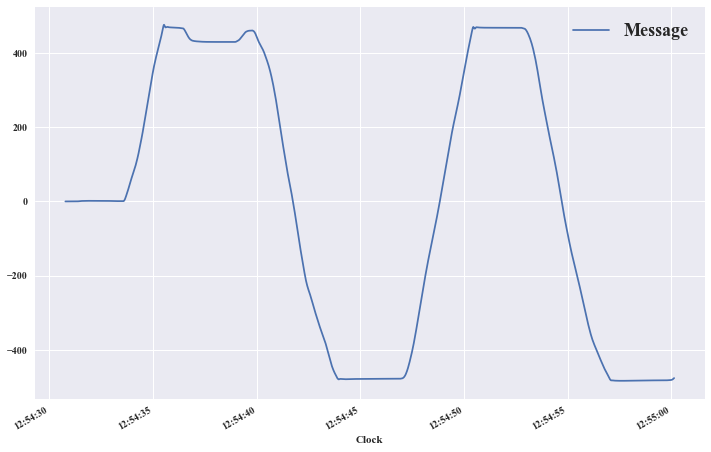
new2D = newdf.resample('10ms').ffill()
newdf = newdf.drop(['Time'], axis = 1)
newdf.plot()
data_rate = 51.65
sampler = (1.0/data_rate)*1000.0
sampler = str(int(sampler)) + "ms"
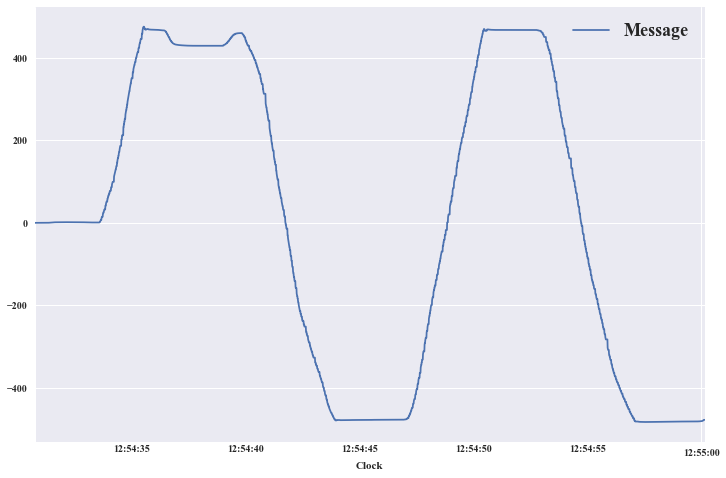
new2D = new2D.drop(['Time'], axis = 1)
new2D.plot()
newdf.shape
[24]:
(1501, 2)
[ ]: